Wymagania i uwarunkowania projektu
- Łańcuch przemieszcza się z różnymi prędkościami, a także w jednej z części linii na ten sam łańcuch manualnie dokładanie są detale.
- Łańcuch transportowy musi być stale obciążony.
- Wszystkie haki transportowe muszą być w użyciu.
- Zawieszane detale mają różną wagę i wielkości.
- to samo stanowisko służy do załadunku i do rozładunku detali po obróbce.
- Przestrzeń pracy robota jest bardzo ograniczona.
- Linia transportowa jest w ciągłym ruchu.
Jak zautomatyzować załadunek i rozładunek w tym przypadku?
Rozwiązaliśmy ten problem projektując i budując specjalną linię buforową posiadającą 6 niezależnych torów na detale przed i po obróbce. Linia buforowa to podwieszana linia Power&Free 360 CALDAN Conveyor A/S. Dzięki temu rozwiązaniu robot pobiera odpowiednie detale do zawieszenia na łańcuchu, a w przypadku braku odpowiedniego przedmiotu, zawiesza pusty wieszak, by łańcuch był odpowiednio obciążony.
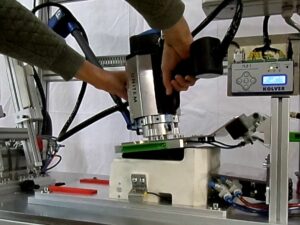
Kolejnym autorskim rozwiązaniem było skonstruowanie chwytaka do precyzyjnego zawieszania przedmiotów na łańcuch. Konieczność zaprojektowania chwytaka wynikała z poruszających się chaotycznie na wielu przegubach elementów oraz z uwagi na różną prędkość łańcucha transportowego, który wprawiał w ruch haki. Nasz chwytak wyposażyliśmy w „palec konstruktora”, którego celem jest przytrzymanie haków transportowych by można było zawiesić produkty.
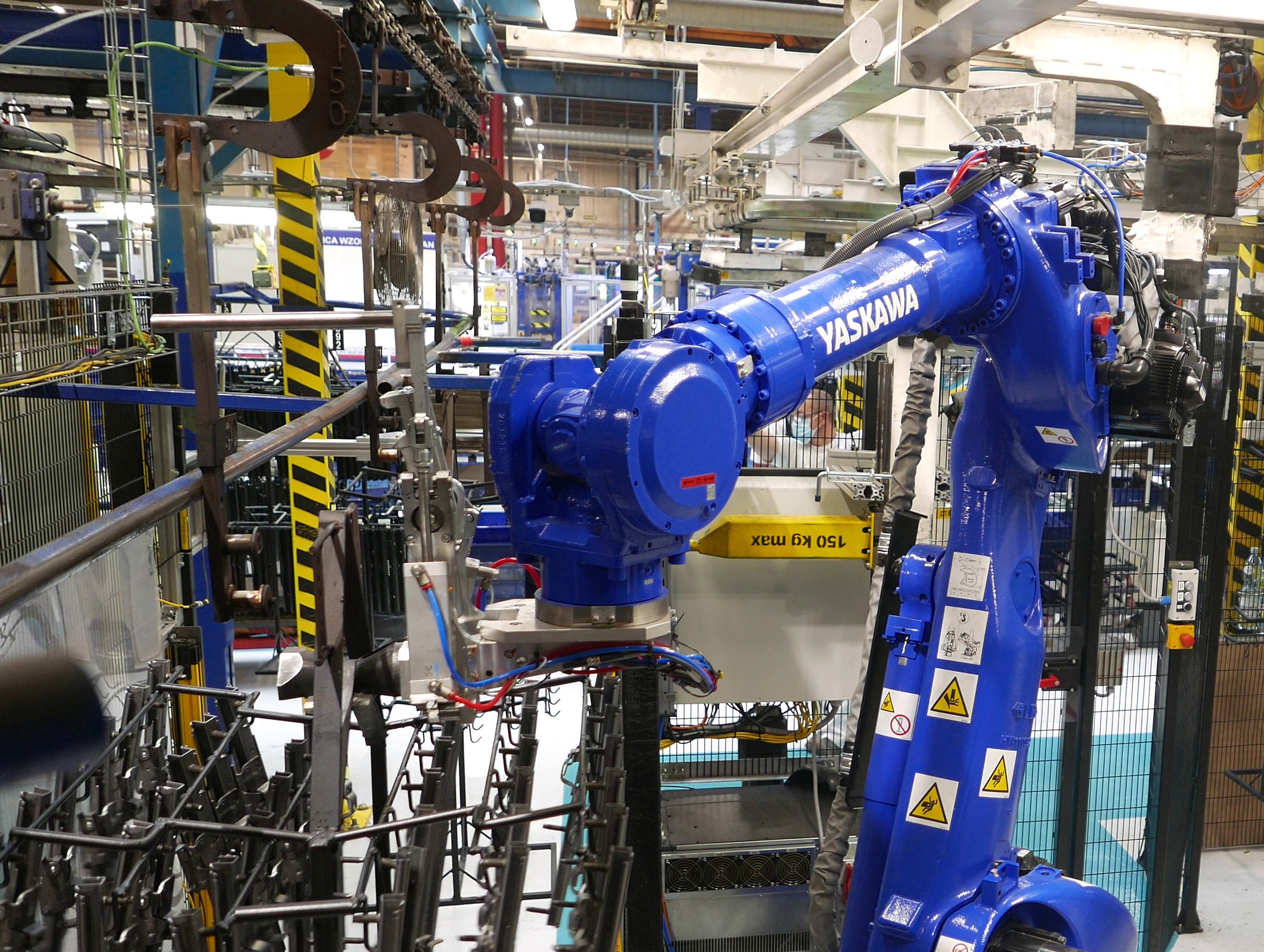
Maszyna nie mogłaby działać bez głównej gwiazdy, czyli przez robota Yaskawa Motoman GP180 sterowanego przez Sterownik Siemens S7-1500.
Pozostałe użyte technologie
Innymi, głównymi technologiami zintegrowanymi przez nas w tej maszynie są:
- siłowniki pneumatyczne Festo,
- czujniki indukcyjne Balluff EMEA,
- czujniki zbliżeniowe Festo Polska,
- Kamery KEYENCE CORPORATION do rozpoznawania haków,
- Profile Item, które stanowiły konstrukcję wielu elementów1) maszyny.
Co zyskał klient?
- możliwość umieszczania wieszaków o różnym ciężarze,
- wyeliminowanie niekontrolowanego przemieszczania się wieszaków,
- umieszczanie określonego wieszaka na przenośniku,
- brak konieczności zwiększenia ograniczonej przestrzeni roboczej robota przemysłowego,
- bardzo krótki czas montażu ze względu na całodobową pracę linii lakierniczej.