Podział robotów produkcyjnych ze względu na ich generację
Przede wszystkim roboty dzielą się ze względu na generacje. Im wyższa jest generacja robotów, tym są one bardziej uniwersalne i sprawniejsze. Wyróżniamy pięć generacji robotów:
- roboty pierwszej generacji – to urządzenia odtwarzające, które są w stanie realizować proste czynności samodzielnie;
- roboty drugiej generacji – charakteryzują się tym, że zostały wyposażone w system sensoryczny, co oznacza, że reagują na dotyk, sygnały dźwiękowe, mają zdolność rozróżniania kolorów i kształtów;
- roboty trzeciej generacji – do których dodano system wizyjny pozwalający na komunikację głosową i obserwowanie zmian w otoczeniu;
- roboty czwartej i piątej generacji – to roboty inteligentne o sterowaniu adaptacyjnym, czyli dopasowującym swoje działanie do zmieniających się warunków.
Podział robotów ze względu na ich przeznaczenie
Roboty nieprzeznaczone do pracy bezpośrednio w przemyśle
Najczęściej roboty dzieli się ze względu na ich wykorzystanie do badań naukowych, celów szkoleniowych, przemysłowych, badawczych, militarnych oraz medycznych.
Osobną kategorią są nanoroboty: urządzenia, które pozwalają na precyzyjną interakcję z obiektami w nanoskali. Taką definicję można przypisać zarówno małym robotom poruszającym się z nanometrową precyzją, jak i dużym urządzeniom, jak na przykład mikroskopowi sił atomowych.
Roboty przemysłowe przeznaczone do wytwarzania produktów
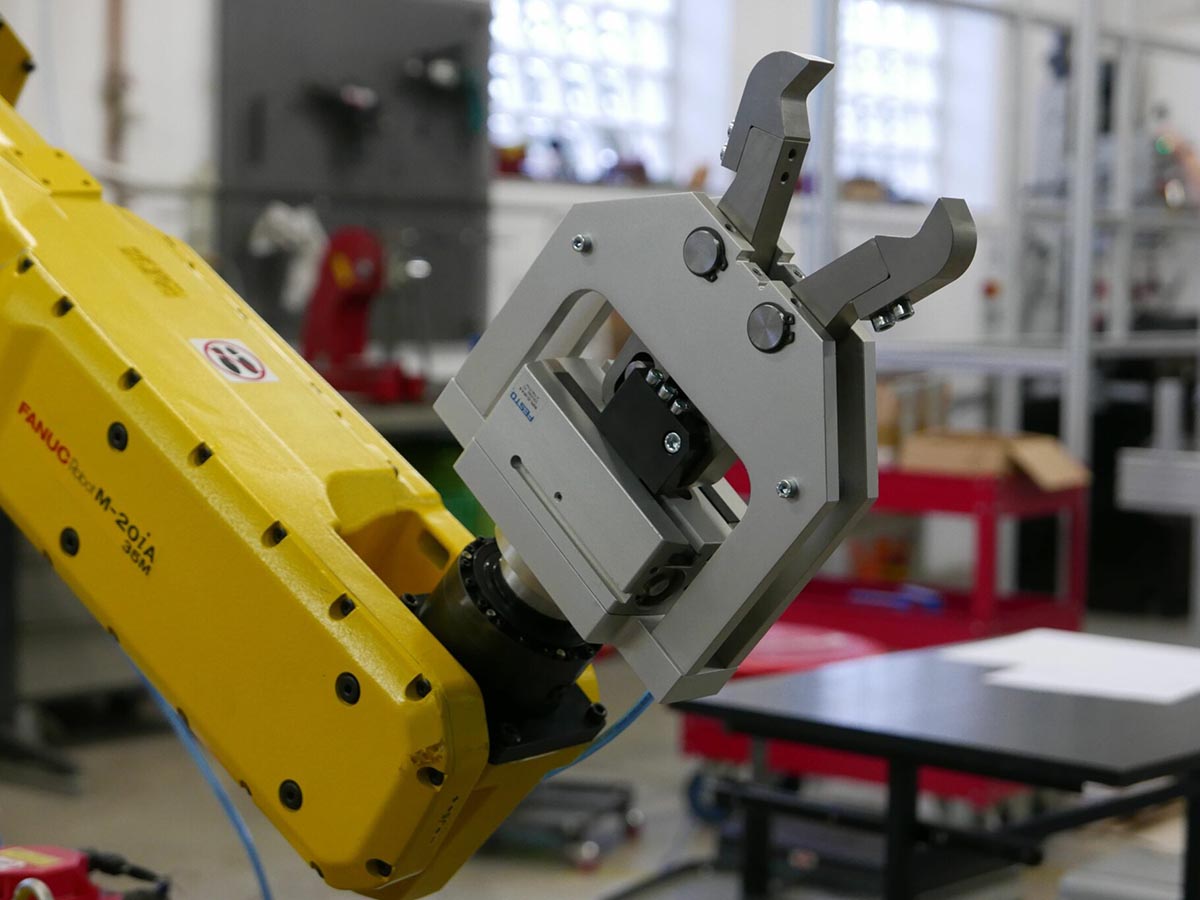
Najczęściej spotykamy na stanowiskach montażowych roboty spawalnicze, roboty malarskie, roboty montażowe, a także roboty do przenoszenia materiałów i załadunku oraz pracujące przy utylizacji i zabezpieczaniu odpadów. Roboty tego typu mogą być zasilane:
- elektrycznie, co jest najczęściej stosowanym rozwiązaniem;
- pneumatycznie, gdzie wykorzystuje się sprężone powietrze lub jakikolwiek inny gaz;
- a także hydrauliczne.
Tego typu roboty przemysłowe stosowane są wszędzie tam, gdzie konieczna jest praca z niezwykle dużym obciążeniem. Ważna jest też mobilność robota i rodzaj zastosowanych przegubów. Wyróżniamy tutaj roboty na stałe przymocowane do podłoża, które najczęściej spotykamy w fabrykach, gdzie istnieje szerokie wykorzystywanie prac na podajnikach, oraz te mobilne. Wśród samych robotów przemysłowych te ostatnie nie są zbyt często spotykane i dużo częściej wykorzystuje się je przy pracach badawczych. Jeżeli zaś chodzi o zastosowane przeguby, to mogą być one rotacyjno – obrotowe, translacyjne – przesuwane lub też mieszane. Sam przegub może być sztywny lub elastyczny, w zależności od pracy, jaką ma wykonywać robot.
Od poziomu trudności zadania zależy też poziom inteligencji robota. Najprostsze są oczywiście urządzenia sterowanie ręcznie. Kiedy praca jest bardziej skomplikowana, stosuje się roboty o zmiennej lub stałej sekwencji ruchów. Do prac na linii produkcyjnej wykorzystywane są bardzo często roboty odtwarzające lub sterowane numerycznie. Dużo rzadziej w pracy przemysłowej korzysta się z robotów inteligentnych. Ten typ robotów nie jest programowany w zakresie faz wykonania zadania, ale zadaje się mu określoną czynność.
Ostatecznie ważna jest także ilość stopni swobody. Tutaj klasyfikacja obejmuje pięć stopni swobody: 11, 10, 9, 8 i 7. Jednakże w produkcji przemysłowej wykorzystywane są tylko roboty IV i V klasy, które posiadają odpowiednio 8 i 7 stopień swobody.
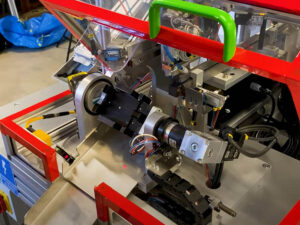
Maszyna specjalna zaprojektowana i zbudowana przez Unitem
Prezentowana maszyna wykorzystuje system wizyjny 3d przydatny do określenia miejsca położenia detalu. System ten autonomicznie kieruje ramieniem i chwytakiem robota. Jest to przykład wykorzystania najwyższego stopnia swobody na linii produkcyjnej przez robota.